カラーグラフ Robotic Surgery・2
腹腔鏡下胆嚢摘出術・腹腔鏡下鼠径ヘルニア修復術
古川 俊治
1
,
若林 剛
1
,
小澤 壯治
1
,
北島 政樹
1
Toshiharu FURUKAWA
1
1慶應義塾大学医学部外科
pp.1361-1366
発行日 2000年11月20日
Published Date 2000/11/20
DOI https://doi.org/10.11477/mf.1407904287
- 有料閲覧
- 文献概要
- 1ページ目
da Vinci®システムの設定
da Vinci®システムの適切な設定のためには,以下の問題を考慮しておかなければならない.
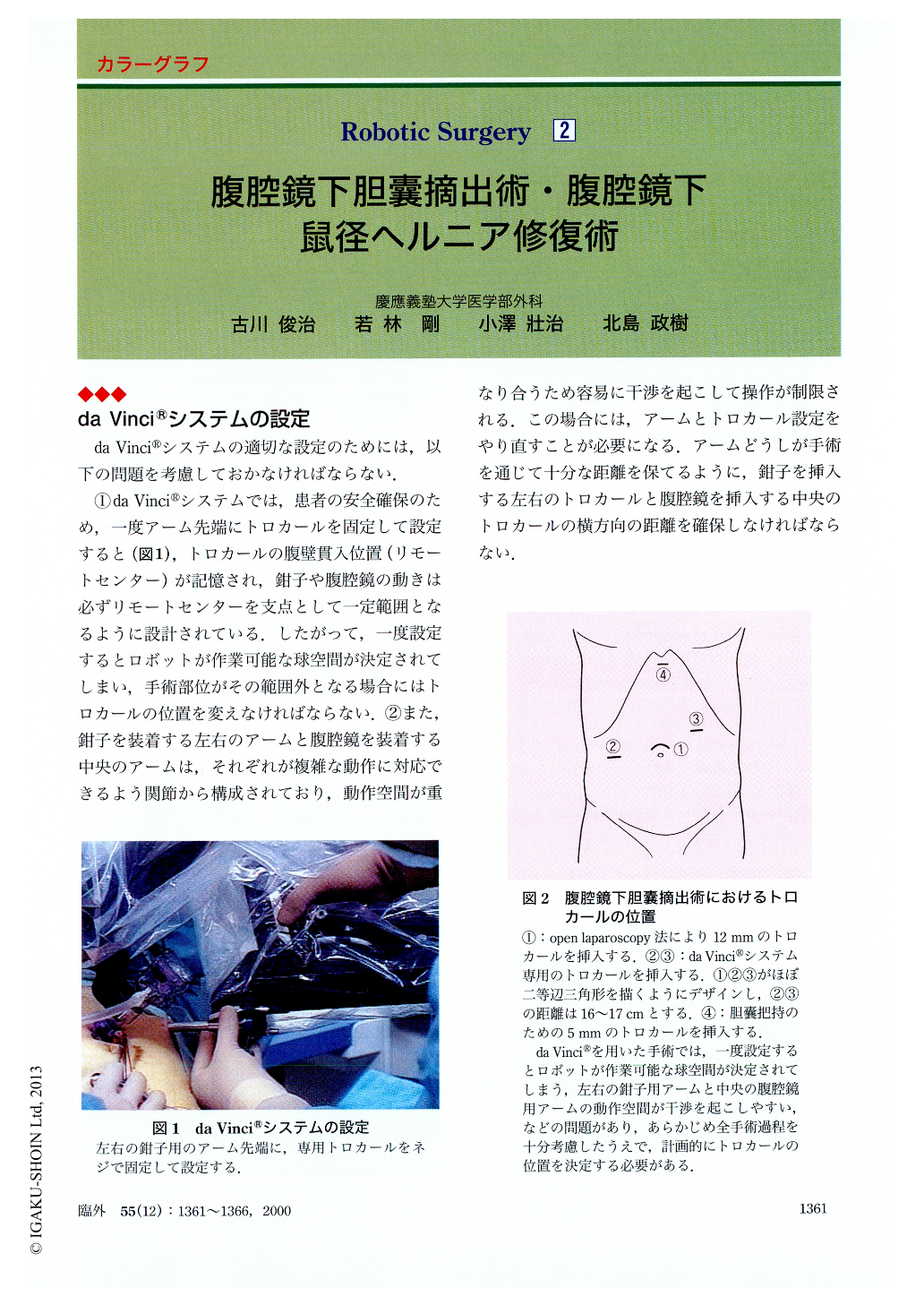
①da Vinci®システムでは,患者の安全確保のため,一度アーム先端にトロカールを固定して設定すると(図1),トロカールの腹壁貫入位置(リモートセンター)が記憶され,鉗子や腹腔鏡の動きは必ずリモートセンターを支点として一定範囲となるように設計されている.したがって,一度設定するとロボットが作業可能な球空間が決定されてしまい,手術部位がその範囲外となる場合にはトロカールの位置を変えなければならない.②また,鉗子を装着する左右のアームと腹腔鏡を装着する中央のアームは,それぞれが複雑な動作に対応できるよう関節から構成されており,動作空間が重なり合うため容易に干渉を起こして操作が制限される.この場合には,アームとトロカール設定をやり直すことが必要になる.アームどうしが手術を通じて十分な距離を保てるように,鉗子を挿入する左右のトロカールと腹腔鏡を挿入する中央のトロカールの横方向の距離を確保しなければならない.
Copyright © 2000, Igaku-Shoin Ltd. All rights reserved.

