OT講座
手副子 Hand Splint(その2)
原 武郎
1
1九州労災病院リハビリテーションセンター
pp.43-50
発行日 1967年11月9日
Published Date 1967/11/9
DOI https://doi.org/10.11477/mf.1518100062
- 有料閲覧
- 文献概要
- 1ページ目
4.機能的把持副子(Flexor Hing Splint)の基本とその変型
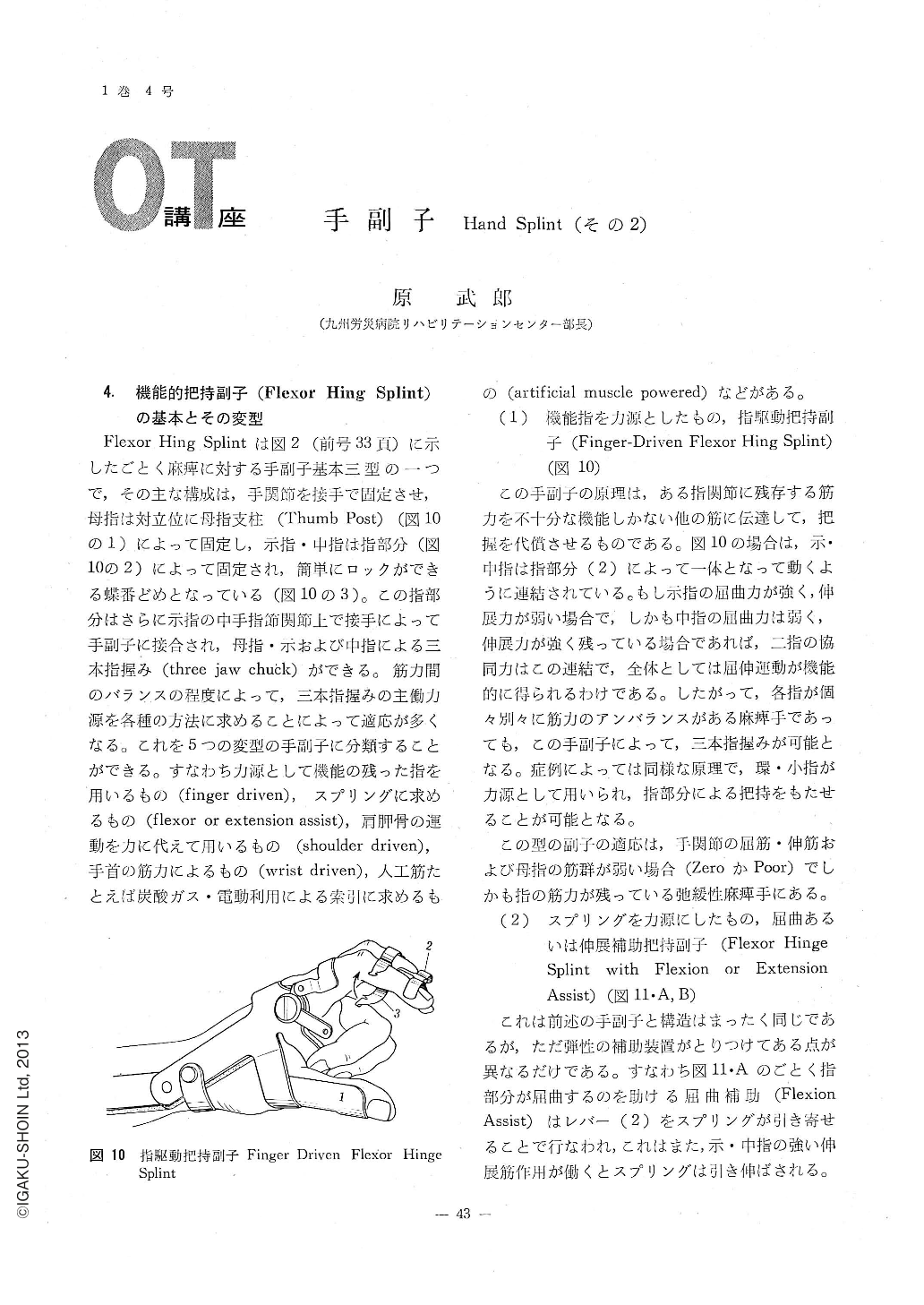
Flexor Hing Splintは図2(前号33頁)に示したごとく麻痺に対する手副子基本三型の一つで,その主な構成は,手関節を接手で固定させ,母指は対立位に母指支柱(Thumb Post)(図10の1)によって固定し,示指・中指は指部分(図10の2)によって固定され,簡単にロックができる蝶番どめとなっている(図10の3)。この指部分はさらに示指の中手指節関節上で接手によって手副子に接合され,母指・示および中指による三本指握み(three jaw chuck)ができる。筋力間のバランスの程度によって,三本指握みの主働力源を各種の方法に求めることによって適応が多くなる。これを5つの変型の手副子に分類することができる。すなわち力源として機能の残った指を用いるもの(finger driven),スプリングに求めるもの(flexor or extension assist),肩胛骨の運動を力に代えて用いるもの(shoulder driven),手首の筋力によるもの(wrist driven),人工筋たとえば炭酸ガス・電動利用による索引に求めるもの(artificial muscle powered)などがある。
Copyright © 1967, Igaku-Shoin Ltd. All rights reserved.

