Japanese
English
- 有料閲覧
- Abstract 文献概要
- 1ページ目 Look Inside
- 参考文献 Reference
はじめに
損なわれた脳神経機能を回復させるべくさまざまなリハビリテーション(以下,リハ)法が提唱される中で,ロボットを使用したリハ治療が近年注目を浴びている.特に,筑波大学の山海研究室で開発されたHybrid Assistive Limb(HAL)は画期的なリハ用ロボットとして日本国内の多くの施設で使用されるようになった.
脊髄脊椎疾患や脳卒中による神経障害を回復させるうえで,急性期から行うニューロリハは必要不可欠であり,いかに効果的なリハを行うかが機能回復にとって重要である.近年の研究から,脊髄損傷や脳卒中の治療におけるロボットを使用したリハの有効性が証明されるようになり,本邦においても急速にロボットリハが広まりつつある.特に,HALを用いたリハの効果については,われわれのグループのみならず国際的にさまざまな報告がある.ドイツのグループから脊髄損傷によって対麻痺となった患者を対象としたHALを使用した歩行訓練の効果に関する報告があったほか1),最近では,筑波大学整形外科のグループから後縦靭帯骨化症の術後歩行障害に対してHALを使用して良好な歩行機能を獲得した症例についての報告も出ている2).
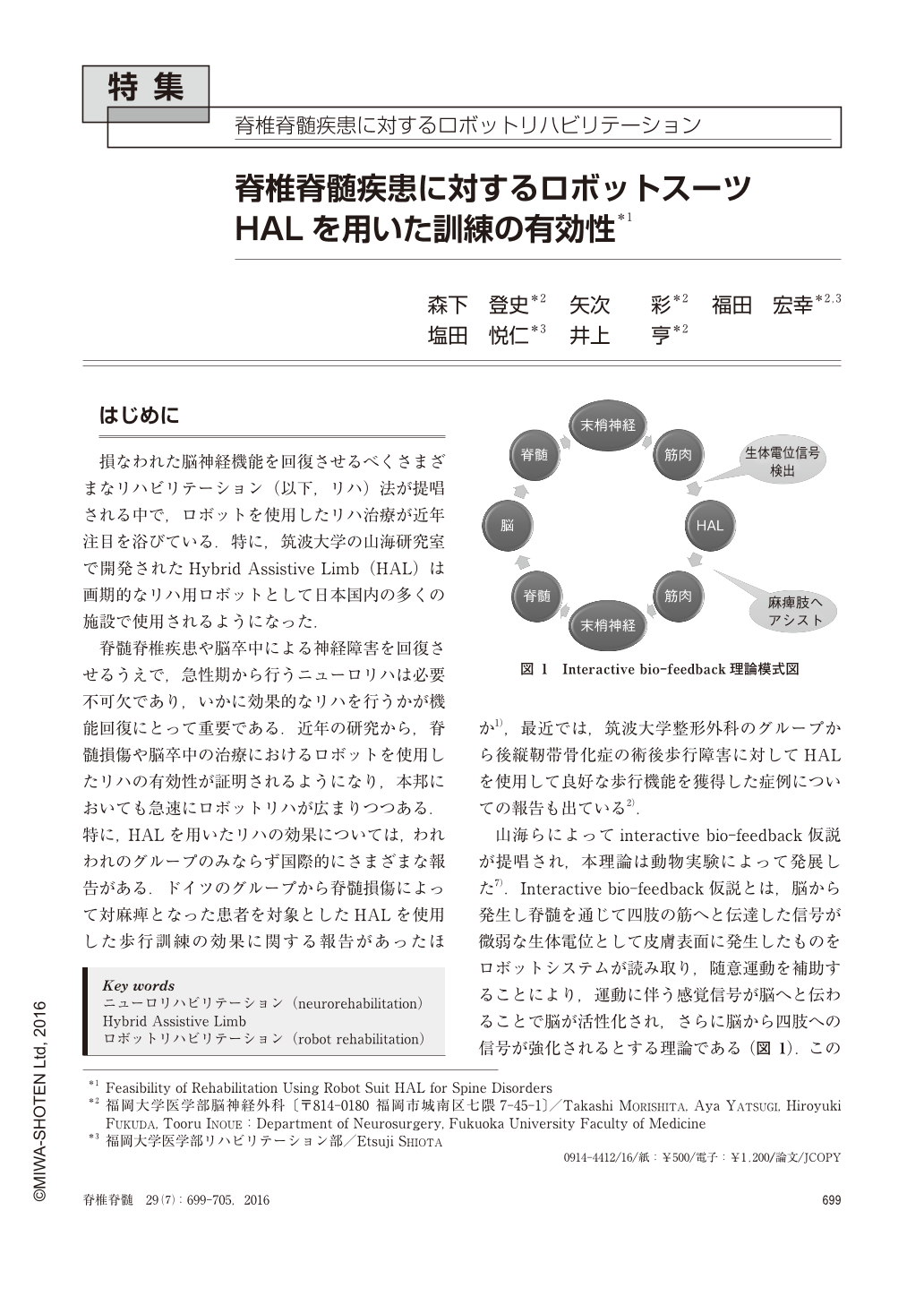
山海らによってinteractive bio-feedback仮説が提唱され,本理論は動物実験によって発展した7).Interactive bio-feedback仮説とは,脳から発生し脊髄を通じて四肢の筋へと伝達した信号が微弱な生体電位として皮膚表面に発生したものをロボットシステムが読み取り,随意運動を補助することにより,運動に伴う感覚信号が脳へと伝わることで脳が活性化され,さらに脳から四肢への信号が強化されるとする理論である(図1).この理論をリハに応用したロボットがHALである.
ロボットスーツHALは,筋肉が収縮した際に検出される微弱な生体電位をトリガーとし,随意的な運動を補助する.HALには両脚型,単脚型,そして単関節型があり,各患者の病状に応じて使い分けが可能である(図2).両脚型は左右両方の脚の動きを補助し,単脚型は左か右の片方の脚の動きを補助しながら患者の歩行を助けるように設計されている.両脚型と単脚型にはそれぞれS,M,Lの3種類のサイズが展開されており,患者の体型に合わせて選択が可能である.また,単関節型のHAL-SJは肘関節と膝関節に装着が可能であるが,腕や脚の長さに合わせてアタッチメント部分を伸縮することができる.
このHALを用いた治療の画期的な点は,脳とロボットが生体電位信号を介してclosed-loopを形成する点である.セラピストなどの補助による単純な他動運動では一方的な関節可動による感覚入力だけ(open-loop)になりがちであるが,HALを用いることで自ら四肢を動かすことによる自動運動が可能となり,患者本人の治療に対する満足度やモチベーションが高まり神経機能回復が促進すると考えられる.これは,麻痺の状態が続くことにより麻痺肢を動かすことを諦めてしまうlearned nonuseという状態を防ぐことにつながるとも考えられる.
ドイツにおいては脊髄損傷後の対麻痺に対するHALを用いたリハの有効性が示され,公的労災保険の適応による治療が可能となっている.本邦においては臨床治験(NCY-3001試験)の良好な結果を受け,筋萎縮性側索硬化症や筋ジストロフィーをはじめとする希少性神経・筋難病8疾患に対して2016年4月からのHAL治療の保険適応が決定している.このように,HALを用いた治療については脳疾患よりも下位神経レベル,つまり脊髄・筋疾患に対してのみ保険収載されている.脳卒中後遺症をはじめとするほかの疾患に対してはいまだ保険適応がないものの,現在さまざまな臨床研究が進められている.
Copyright © 2016, MIWA-SHOTEN Ltd., All rights reserved.

