Japanese
English
- 有料閲覧
- Abstract 文献概要
- 1ページ目 Look Inside
- 参考文献 Reference
Key Questions
Q1:ロボットは麻痺を改善するか?
Q2:ロボットの長所と短所は何か?
Q3:ロボットの短所を補う方法は?
はじめに
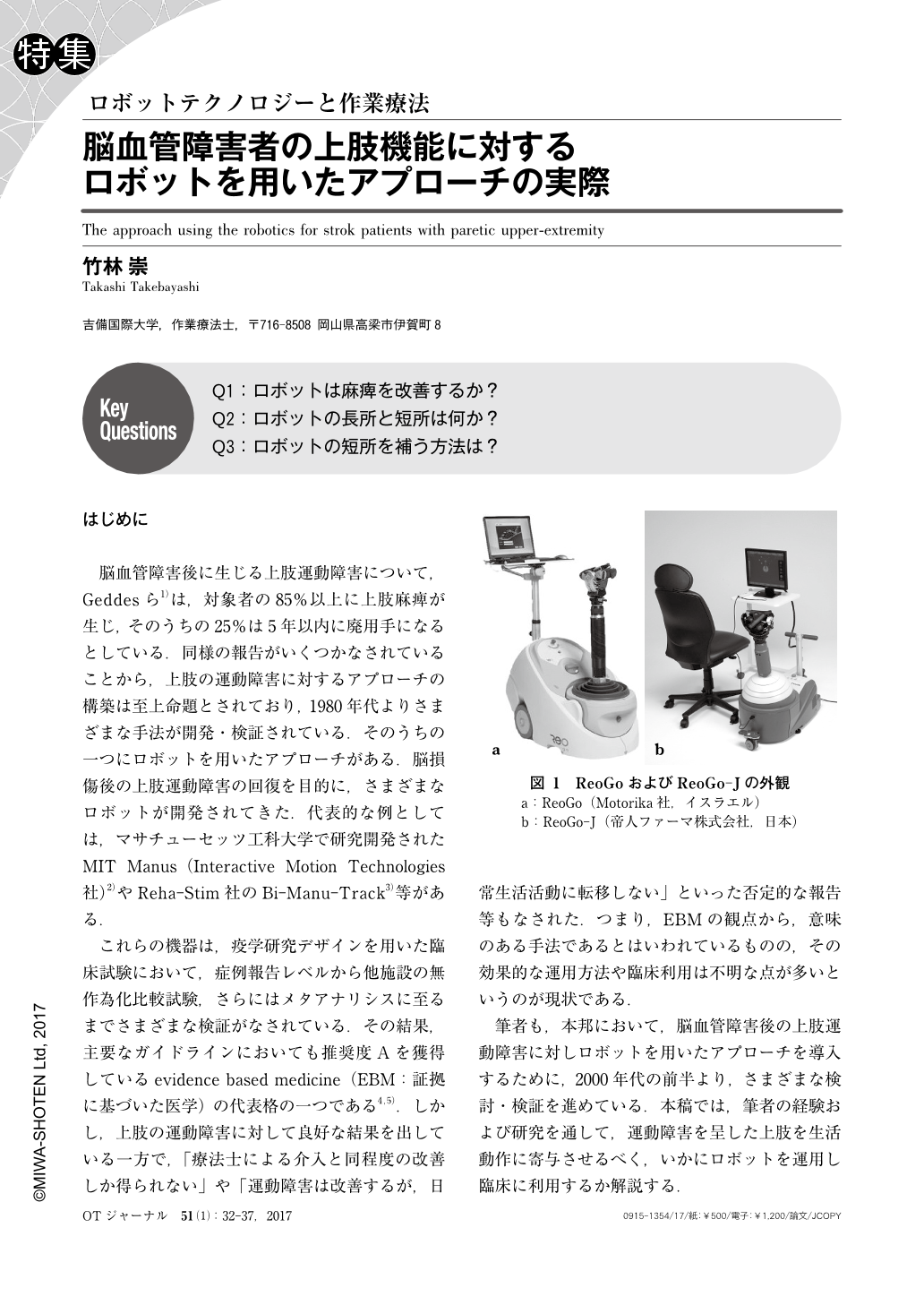
脳血管障害後に生じる上肢運動障害について,Geddesら1)は,対象者の85%以上に上肢麻痺が生じ,そのうちの25%は5年以内に廃用手になるとしている.同様の報告がいくつかなされていることから,上肢の運動障害に対するアプローチの構築は至上命題とされており,1980年代よりさまざまな手法が開発・検証されている.そのうちの一つにロボットを用いたアプローチがある.脳損傷後の上肢運動障害の回復を目的に,さまざまなロボットが開発されてきた.代表的な例としては,マサチューセッツ工科大学で研究開発されたMIT Manus(Interactive Motion Technologies社)2)やReha-Stim社のBi-Manu-Track3)等がある.
これらの機器は,疫学研究デザインを用いた臨床試験において,症例報告レベルから他施設の無作為化比較試験,さらにはメタアナリシスに至るまでさまざまな検証がなされている.その結果,主要なガイドラインにおいても推奨度Aを獲得しているevidence based medicine(EBM:証拠に基づいた医学)の代表格の一つである4,5).しかし,上肢の運動障害に対して良好な結果を出している一方で,「療法士による介入と同程度の改善しか得られない」や「運動障害は改善するが,日常生活活動に転移しない」といった否定的な報告等もなされた.つまり,EBMの観点から,意味のある手法であるとはいわれているものの,その効果的な運用方法や臨床利用は不明な点が多いというのが現状である.
筆者も,本邦において,脳血管障害後の上肢運動障害に対しロボットを用いたアプローチを導入するために,2000年代の前半より,さまざまな検討・検証を進めている.本稿では,筆者の経験および研究を通して,運動障害を呈した上肢を生活動作に寄与させるべく,いかにロボットを運用し臨床に利用するか解説する.
Copyright © 2017, MIWA-SHOTEN Ltd., All rights reserved.

