連載
え? 知らないの?人工呼吸器のclosed loop control Part 2
開 正宏
1
,
森實 雅司
2
1日本赤十字社愛知医療センター名古屋第一病院 臨床工学科
2済生会横浜市東部病院 臨床工学部
pp.852-860
発行日 2022年10月1日
Published Date 2022/10/1
DOI https://doi.org/10.11477/mf.3102201041
- 有料閲覧
- 文献概要
- 1ページ目
- 参考文献
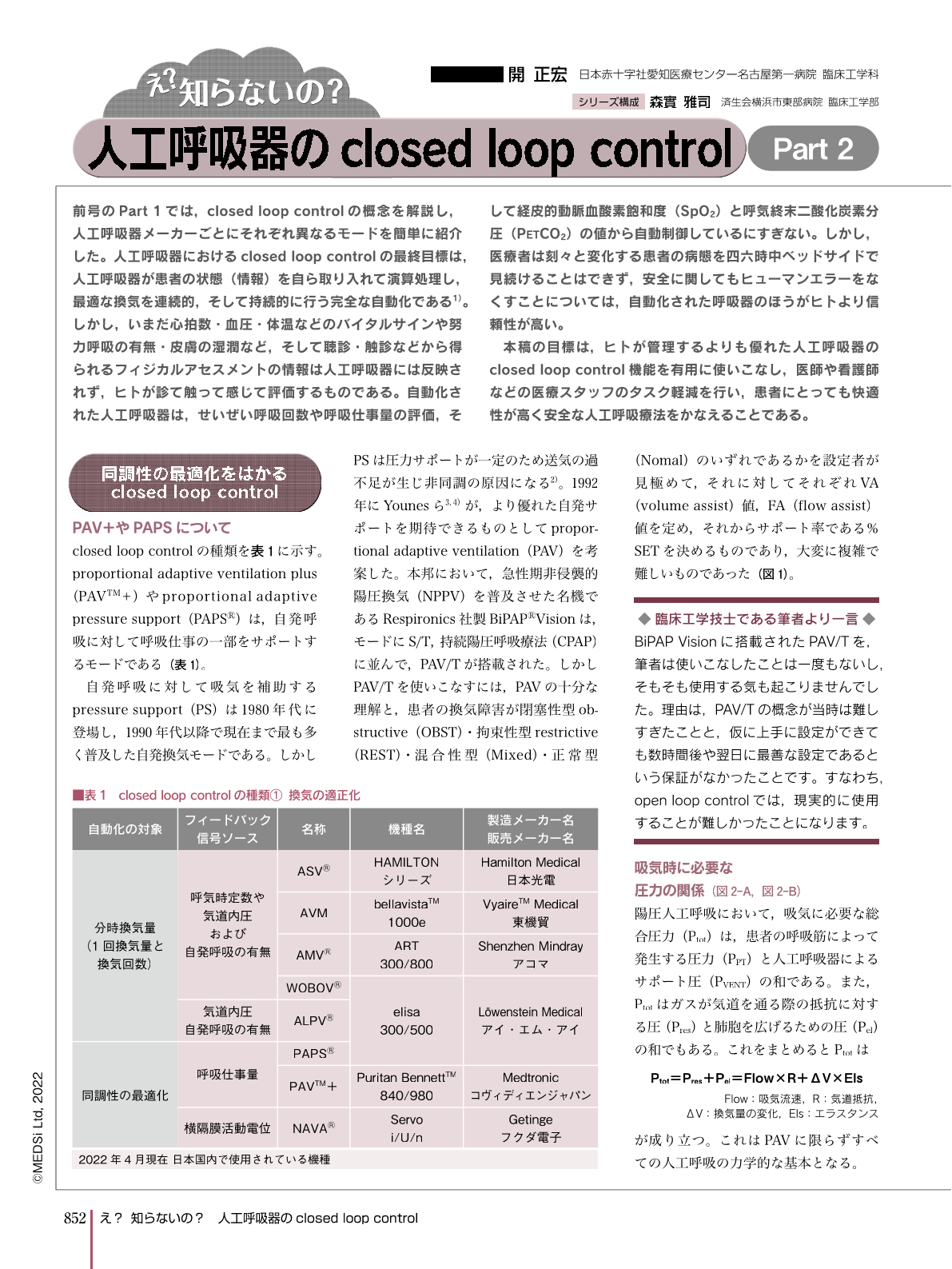
前号のPart 1では,closed loop controlの概念を解説し,人工呼吸器メーカーごとにそれぞれ異なるモードを簡単に紹介した。人工呼吸器におけるclosed loop controlの最終目標は,人工呼吸器が患者の状態(情報)を自ら取り入れて演算処理し,最適な換気を連続的,そして持続的に行う完全な自動化である1)。しかし,いまだ心拍数・血圧・体温などのバイタルサインや努力呼吸の有無・皮膚の湿潤など,そして聴診・触診などから得られるフィジカルアセスメントの情報は人工呼吸器には反映されず,ヒトが診て触って感じて評価するものである。自動化された人工呼吸器は,せいぜい呼吸回数や呼吸仕事量の評価,そして経皮的動脈血酸素飽和度(SpO2)と呼気終末二酸化炭素分圧(PETCO2)の値から自動制御しているにすぎない。しかし,医療者は刻々と変化する患者の病態を四六時中ベッドサイドで見続けることはできず,安全に関してもヒューマンエラーをなくすことについては,自動化された呼吸器のほうがヒトより信頼性が高い。
本稿の目標は,ヒトが管理するよりも優れた人工呼吸器のclosed loop control機能を有用に使いこなし,医師や看護師などの医療スタッフのタスク軽減を行い,患者にとっても快適性が高く安全な人工呼吸療法をかなえることである。
Copyright © 2022, MEDICAL SCIENCES INTERNATIONAL, LTD. All rights reserved.

