- 有料閲覧
- 文献概要
- 1ページ目
- 参考文献
はじめに
近年,歩行機能再建に向け,ロボット工学などの工学的観点からのアプローチが盛んになっている.ヒューマノイドロボットの歩行制御技術は,ヒト歩行のアシスト・リハビリテーションへの応用の期待も高い.本研究では,受動歩行由来の無動力の歩行支援機器を提案している1〜3).
受動歩行ロボットは,動力モータ(含バッテリ)やセンサをもたず,制御を一切行わず緩やかな下りスロープを歩くことができる.ロボットを支えながら脚に位相差を付けてスロープに解き放つと,力強く歩み出す.ロボットが手元から離れていくとき,本質的に「歩ける」ことを実感する.受動歩行は,重力効果のみによって遊脚膝が自然に曲がり,脚の振り抜きが行われる.また,脚軌道があらかじめ決められているわけではなく,ロボットのもつダイナミクスと環境との相互作用のみによって歩容を生成する.したがって,動いているけれども,必ずしも動かしているわけではない.
受動歩行ロボットは,エネルギー効率が高いことで知られ,ヒトの歩行に近いとも言われる.歩行現象の力学的原理(歩行力学)を探究するうえで重要である.一方,調子の良し悪しがあり,不意に転倒するなどの側面をもっているが,見方によっては,ヒトにも通じる歩行機構の繊細さがしっかり表現されている.
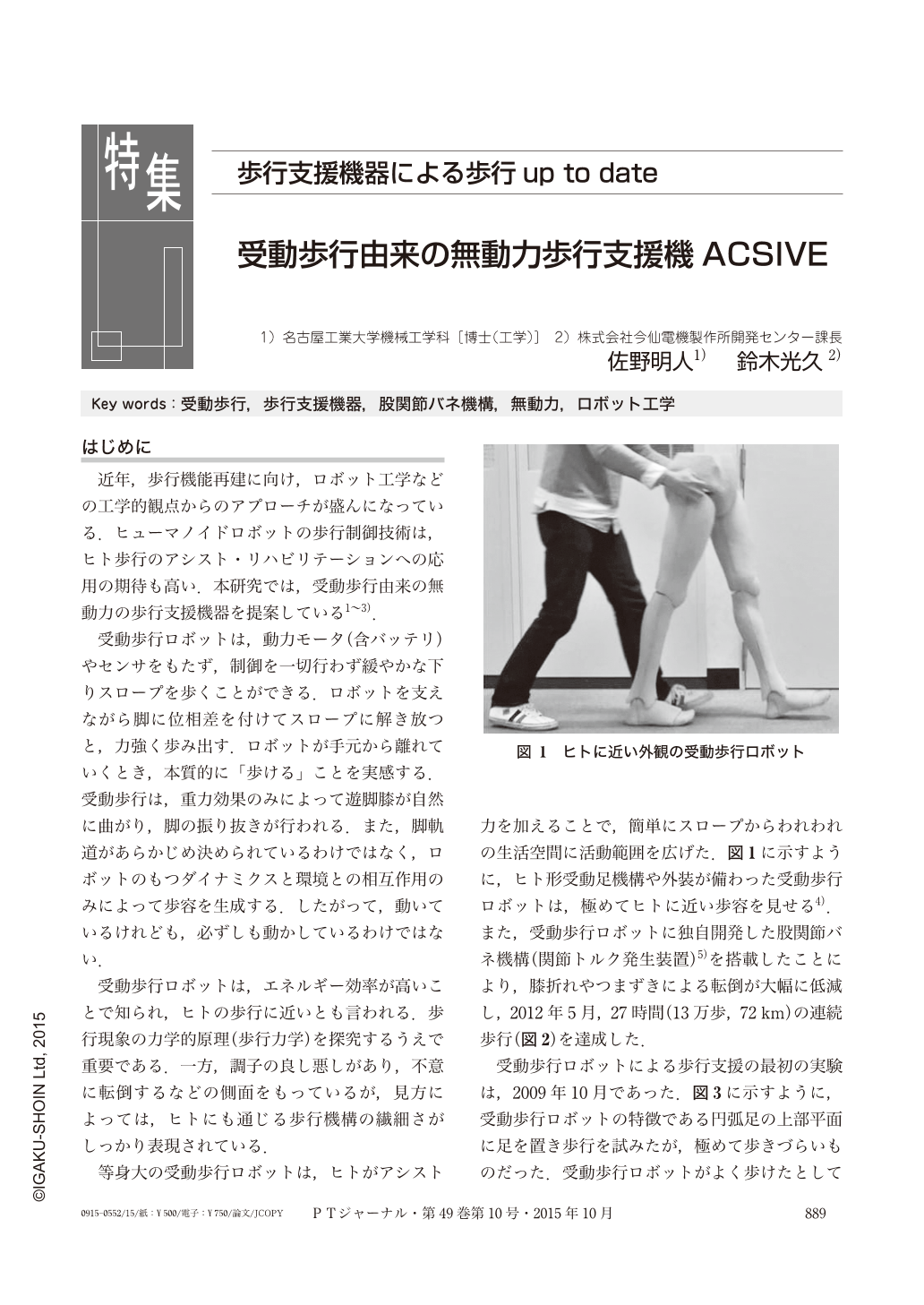
等身大の受動歩行ロボットは,ヒトがアシスト力を加えることで,簡単にスロープからわれわれの生活空間に活動範囲を広げた.図1に示すように,ヒト形受動足機構や外装が備わった受動歩行ロボットは,極めてヒトに近い歩容を見せる4).また,受動歩行ロボットに独自開発した股関節バネ機構(関節トルク発生装置)5)を搭載したことにより,膝折れやつまずきによる転倒が大幅に低減し,2012年5月,27時間(13万歩,72km)の連続歩行(図2)を達成した.
受動歩行ロボットによる歩行支援の最初の実験は,2009年10月であった.図3に示すように,受動歩行ロボットの特徴である円弧足の上部平面に足を置き歩行を試みたが,極めて歩きづらいものだった.受動歩行ロボットがよく歩けたとしても,それをどのようにヒトの歩行支援につなげればよいかは未知の領域であった.本稿では,その後,無動力歩行支援機ACSIVE(アクシブ)を実用化するまでを振り返り,ACSIVEのコンセプトと構造を紹介し,ヒト歩行をどのように支援するかを概説する.
Copyright © 2015, Igaku-Shoin Ltd. All rights reserved.

