発行日 2006年8月1日
Published Date 2006/8/1
DOI https://doi.org/10.15106/J00764.2006302239
- 有料閲覧
- 文献概要
- 1ページ目
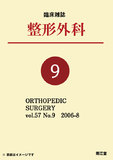
人工股関節全置換術(THA)後のカップネックインピンジメントまでの理論的可動域(ROM)を決定する,人工関節自身の可動範囲(θ),カップの外方開角(α),カップの前方開角(β),ネックの横断面からの角度(a),ネックの前捻角(b)の5つの各因子と5方向のROMとの関係について検討した.作製した計算式を用いて5つの因子を組み合わせた計1024個の条件でのROMを算出し,屈曲,90°屈曲位内旋,外旋,伸展,内転の5方向のROMとした.Oscillation angle(θ)が大きくなると,ROMは全方向で増加し,これにより,4方向の各運動方向の必要可動域条件を全て満たすことのできるカップネック設置位置の安全域を大きくすることになり,安全域に関して最も重要な因子であった.ネックステム角が大きくなると屈曲は減少し,同程度外旋が増加するため,ネックステム角のカップネック設置位置の安全域の大ききへの影響は少ないと思われた.カップ外方開角,カップ前方開角,ネック前捻角の増加は,屈曲,90°屈曲位内旋を増加,外旋を減少させ,カップ前方開角,ネック前捻角の増加は伸展を減少させた.即ち,この3因子とネックステム角の増加ではともに,ROMが増加する運動方向と逆に減少する運動方向があり,これら4因子ともカップネック設置位置の安全域を大きくするための影響力は小さいと考えられた
©Nankodo Co., Ltd., 2006