Japanese
English
成人股関節疾患の診断と治療 Ⅱ.治療
3.人工股関節全置換術
3)手術支援
術中の骨盤傾斜を補正するカップ設置支援デバイスHipPointer
-――視覚化による直感的かつ精度の高いカップ設置
HipPointer:an intraoperative assisted device for pelvic tilt correction and visualization-based accurate cup placement in total hip arthroplasty
仲宗根 哲
1
,
高江洲 美香
1
,
鷲﨑 郁之
1
,
伊藝 尚弘
1
,
國吉 さくら
1
,
大槻 健太
1
,
西田 康太郎
1
S. Nakasone
1
,
M. Takaesu
1
,
F. Washizaki
1
,
T. Igei
1
,
S. Kuniyoshi
1
,
K. Otsuki
1
,
K. Nishida
1
1琉球大学整形外科
1Dept. of Orthop. Surg., University of the Ryukyus, Okinawa
キーワード:
intraoperative assisted device
,
visualization
,
THA
Keyword:
intraoperative assisted device
,
visualization
,
THA
pp.116-123
発行日 2025年10月20日
Published Date 2025/10/20
DOI https://doi.org/10.15106/j_besei88_116
- 有料閲覧
- Abstract 文献概要
- 1ページ目 Look Inside
- 参考文献 Reference
は じ め に
近年,ロボット支援手術やナビゲーション技術の発展により,人工股関節全置換術(THA)における術中の骨盤追従機能が飛躍的に向上し,カップの正確な設置が可能となっている1~4).これらの技術革新は,術後成績の向上に寄与し,確実に患者の利益へとつながっていると考えられる.
一方で,手術室では術中の不測の事態(ピットフォール)に対して迅速に対応できる知識や技術も,術者には依然として求められている.特に従来のアナログ技術はしばしば「時代遅れ」とみなされがちであるが,術中における視覚的な情報を活用した直感的な操作は,むしろ現在においてもきわめて重要である.
仰臥位によるTHAでは,寛骨臼の展開が容易であり,術中透視も活用できるという利点があるが,一方でレトラクター操作による骨盤傾斜の変化が,術中のカップ設置精度に悪影響を及ぼすリスクがある5~7).特に術中イメージ画像に過度に依存すると,骨盤傾斜の変化により設置精度が低下する可能性がある8,9).
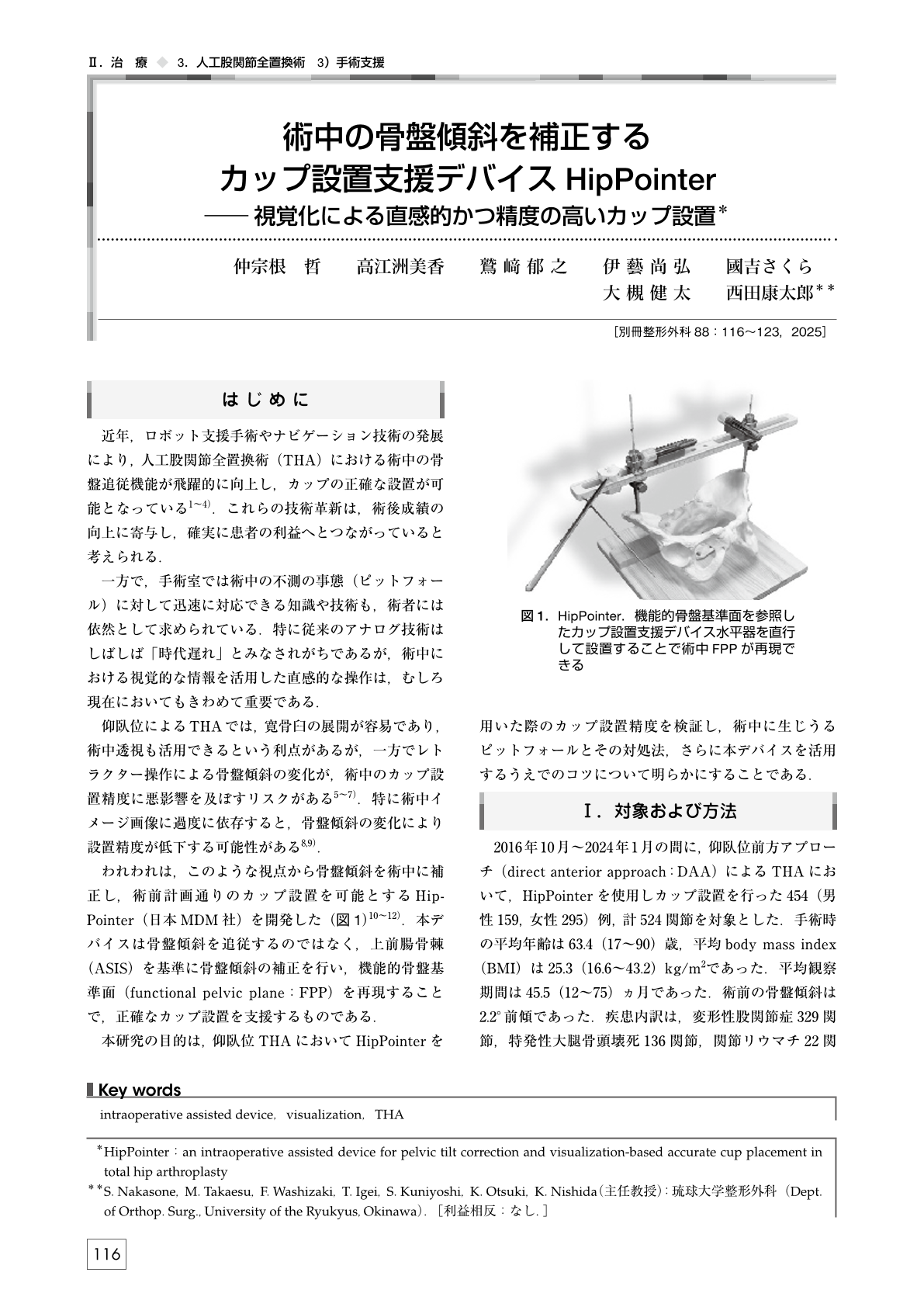
われわれは,このような視点から骨盤傾斜を術中に補正し,術前計画通りのカップ設置を可能とするHipPointer(日本MDM社)を開発した(図1)10~12).本デバイスは骨盤傾斜を追従するのではなく,上前腸骨棘(ASIS)を基準に骨盤傾斜の補正を行い,機能的骨盤基準面(functional pelvic plane:FPP)を再現することで,正確なカップ設置を支援するものである.
本研究の目的は,仰臥位THAにおいてHipPointerを用いた際のカップ設置精度を検証し,術中に生じうるピットフォールとその対処法,さらに本デバイスを活用するうえでのコツについて明らかにすることである.
© Nankodo Co., Ltd., 2025

