シンポジウム 日本の義肢問題
動力駆動義肢
電動義手の研究
玉井 達二
1
,
北川 敏夫
1
,
米満 弘之
1
,
外間 祥介
1
,
本田 五男
1
,
鍋島 敏
2
,
牧野 輝次
2
,
佐藤 昌康
3
,
鬼木 泰博
4
,
緒方 甫
4
,
徳田 明見
5
Tatsuji TAMAI
1
1熊本大学医学部整形外科学教室
2熊本大学工学部電子工学科教室
3熊本大学医学部生理学教室
4水俣市立病院附属湯の児分院
5徳田義肢製作所
pp.849-851
発行日 1968年10月25日
Published Date 1968/10/25
DOI https://doi.org/10.11477/mf.1408903985
- 有料閲覧
- 文献概要
- 1ページ目
はじめに
私たちは2年前より,電気を力源とする駆動義手の研究と試作を行ない,そのⅠ型,Ⅱ型を作製して,昨年,本誌2巻11号にて発表した.その際にも述べたが,義手が実用化されるには,①その形は本来の手に近く,②装着が簡単にできて,装置が堅牢であること,③安価であること,④フィード・バック装置を有すること,⑤義手の動きが意志と一致することなどが望ましい.
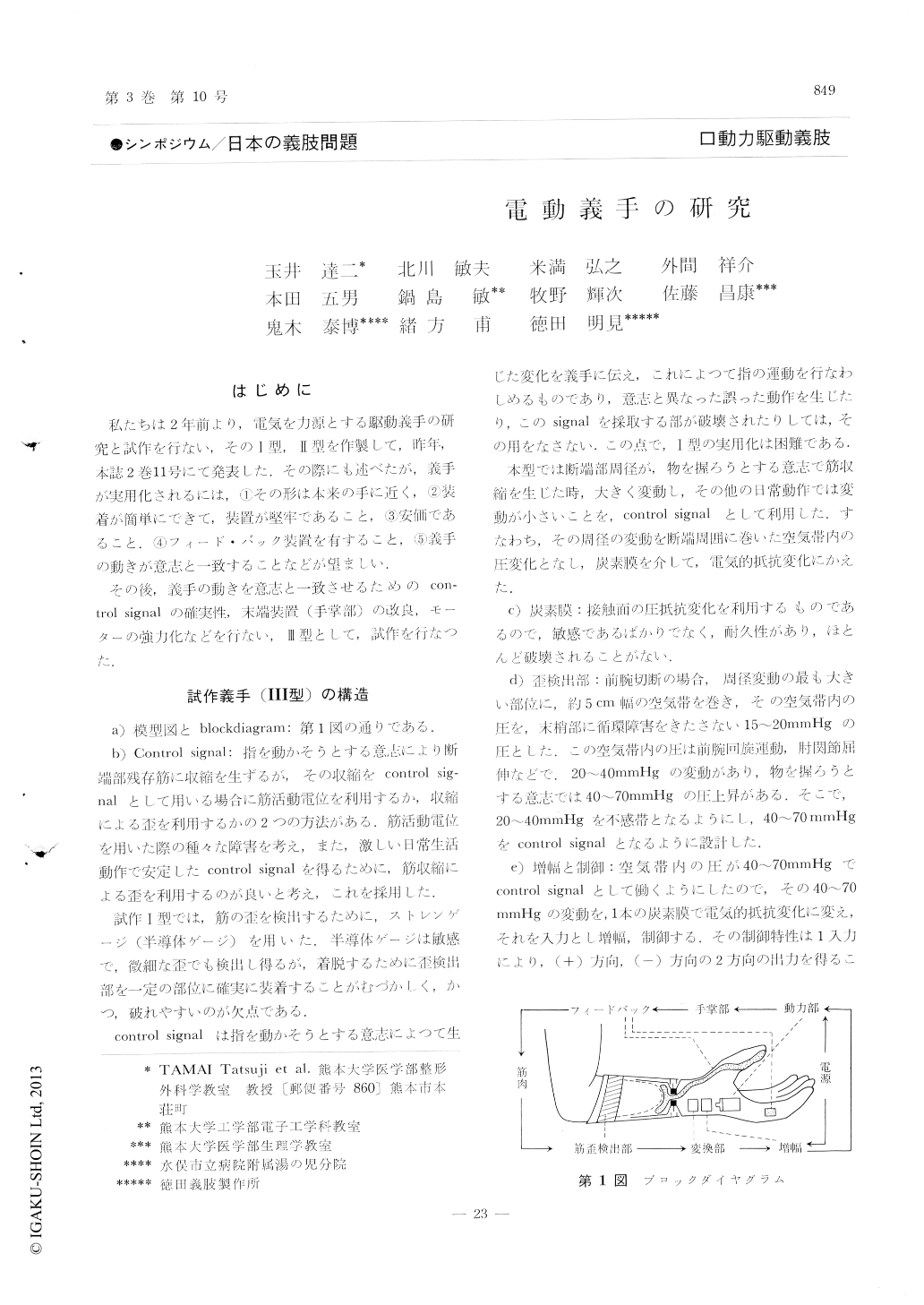
その後,義手の動きを意志と一致させるためのcontrol signalの確実性,末端装置(手掌部)の改良,モーターの強力化などを行ない,Ⅲ型として,試作を行なつた.
Copyright © 1968, Igaku-Shoin Ltd. All rights reserved.

