連載 視覚ベースの動作分析・評価・第11回
姿勢の見方—姿勢制御の観点から
今井 良輔
1
Ryosuke IMAI
1
1ごんどう整形外科
pp.261-263
発行日 2025年3月15日
Published Date 2025/3/15
DOI https://doi.org/10.11477/mf.091505520590030261
- 有料閲覧
- 文献概要
- 1ページ目
- 参考文献
はじめに
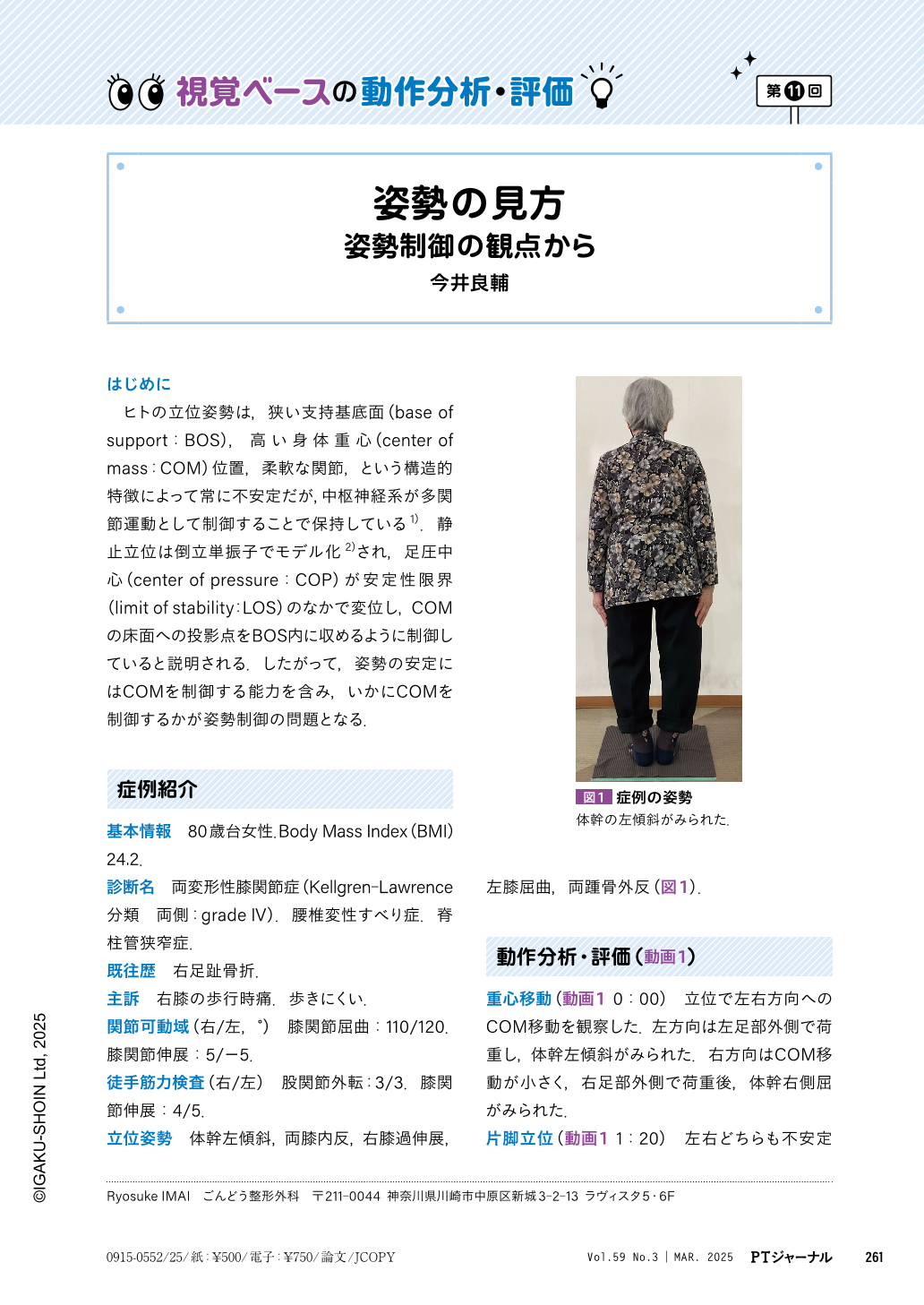
ヒトの立位姿勢は,狭い支持基底面(base of support:BOS),高い身体重心(center of mass:COM)位置,柔軟な関節,という構造的特徴によって常に不安定だが,中枢神経系が多関節運動として制御することで保持している1).静止立位は倒立単振子でモデル化2)され,足圧中心(center of pressure:COP)が安定性限界(limit of stability:LOS)のなかで変位し,COMの床面への投影点をBOS内に収めるように制御していると説明される.したがって,姿勢の安定にはCOMを制御する能力を含み,いかにCOMを制御するかが姿勢制御の問題となる.
*本論文中,動画マークのある箇所につきましては,関連する動画を見ることができます(公開期間:2028年3月31日).
Copyright © 2025, Igaku-Shoin Ltd. All rights reserved.

