Japanese
English
特集 脳のモデル
現代制御論と脳
Modern control theory and modeling in the cerebellum
伊藤 正美
1
Masami Ito
1
1名古屋大学工学部情報工学科
pp.21-25
発行日 1986年2月15日
Published Date 1986/2/15
DOI https://doi.org/10.11477/mf.2425904826
- 有料閲覧
- Abstract 文献概要
- 1ページ目 Look Inside
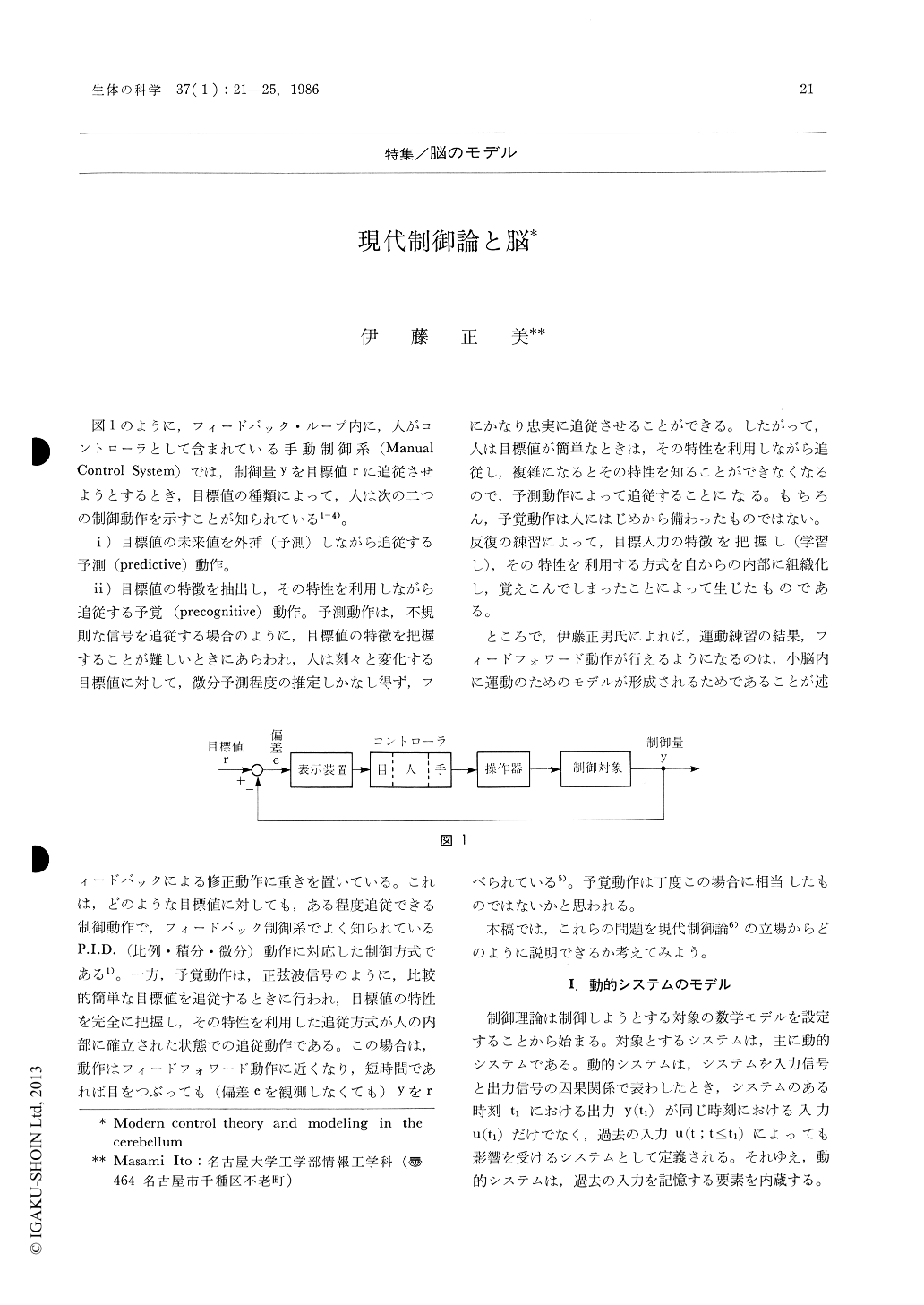
図1のように,フィードバック・ループ内に,人がコントローラとして含まれている手動制御系(ManualControl System)では,制御量yを目標値rに追従させようとするとき,目標値の種類によって,人は次の二つの制御動作を示すことが知られている1-4)。
i)目標値の未来値を外挿(予測)しながら追従する予測(predictive)動作。
ii)目標値の特徴を抽出し,その特性を利用しながら追従する予覚(precognitive)動作。予測動作は,不規則な信号を追従する場合のように,目標値の特徴を把握することが難しいときにあらわれ,人は刻々と変化する目標値に対して,微分予測程度の推定しかなし得ず,フイードバックによる修正動作に重きを置いている。これは,どのような目標値に対しても,ある程度追従できる制御動作で,フィードバック制御系でよく知られているP. I. D.(比例・積分・微分)動作に対応した制御方式である1)。一方,予覚動作は,正弦波信号のように,比較的簡単な目標値を追従するときに行われ,目標値の特性を完全に把握し,その特性を利用した追従方式が人の内部に確立された状態での追従動作である。この場合は,動作はフィードフォワード動作に近くなり,短時間であれば目をつぶっても(偏差eを観測しなくても)yをrにかなり忠実に追従させることができる。
Copyright © 1986, THE ICHIRO KANEHARA FOUNDATION. All rights reserved.

