シンポジウム 日本の義肢問題
動力駆動義肢
電子義手の制御システム
末松 辰美
1
Tatsumi SUEMATSU
1
1東京医科歯科大学医用器材研究所電気機器部門
pp.843-846
発行日 1968年10月25日
Published Date 1968/10/25
DOI https://doi.org/10.11477/mf.1408903983
- 有料閲覧
- 文献概要
- 1ページ目
I.電子義手の位置づけ
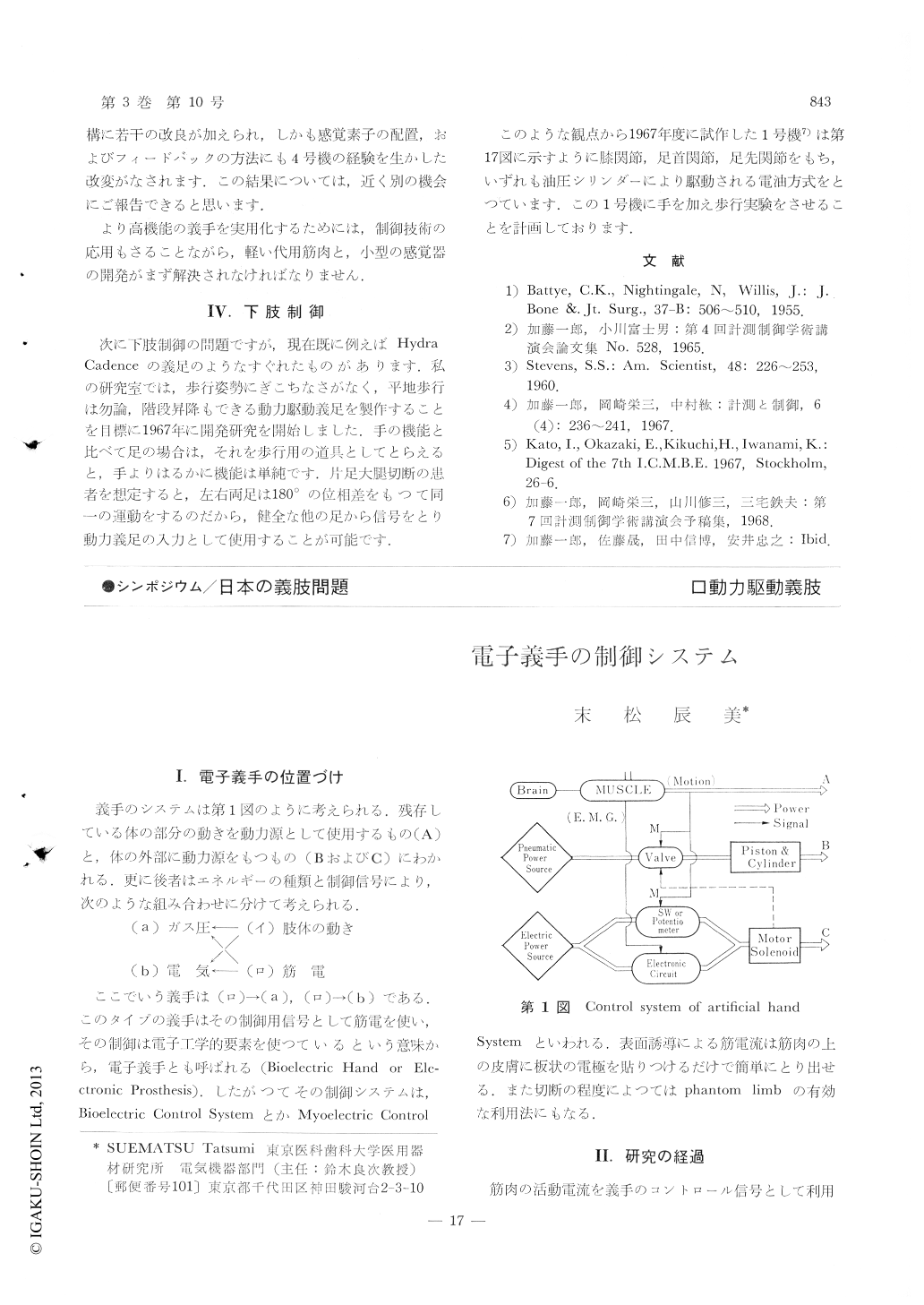
義手のシステムは第1図のように考えられる.残存している体の部分の動きを動力源として使用するもの(A)と,体の外部に動力源をもつもの(BおよびC)にわかれる.更に後者はエネルギーの種類と制御信号により,次のような組み合わせに分けて考えられる.
ここでいう義手は(ロ)→(a),(ロ)→(b)である.このタイプの義手はその制御用信号として筋電を使い,その制御は電子工学的要素を使つているという意味から,電子義手とも呼ばれる(Bioelectric Hand or Electronic Prosthcsis).したがつてその制御システムは,Bioelectric Control SystemとかMyoelectric Control Systemといわれる.表面誘導による筋電流は筋肉の上の皮膚に板状の電極を貼りつけるだけで簡単にとり出せる.また切断の程度によつてはphantom limbの有効な利用法にもなる.
Copyright © 1968, Igaku-Shoin Ltd. All rights reserved.

