手術器具・手術材料—私のこだわり・8
腹腔鏡下手術・ロボット支援下手術における「俵型ガーゼ」の開発と有効性
中山 吾郎
1,2
,
田路 育恵
3
,
宮田 かおり
3
,
中村 貴之
4
,
生田 直子
5
,
服部 憲史
1,2
,
梅田 晋一
1,2
,
家崎 志のぶ
3
,
小寺 泰弘
1
Goro NAKAYAMA
1,2
1名古屋大学大学院医学系研究科消化器外科学
2名古屋大学医学部附属病院炎症性腸疾患治療センター
3名古屋大学医学部附属病院看護部(手術室)
4オオサキメディカル株式会社商品開発部
5名古屋大学学術研究・産学官連携推進本部
pp.999-1001
発行日 2022年8月20日
Published Date 2022/8/20
DOI https://doi.org/10.11477/mf.1407213806
- 有料閲覧
- 文献概要
- 1ページ目
はじめに
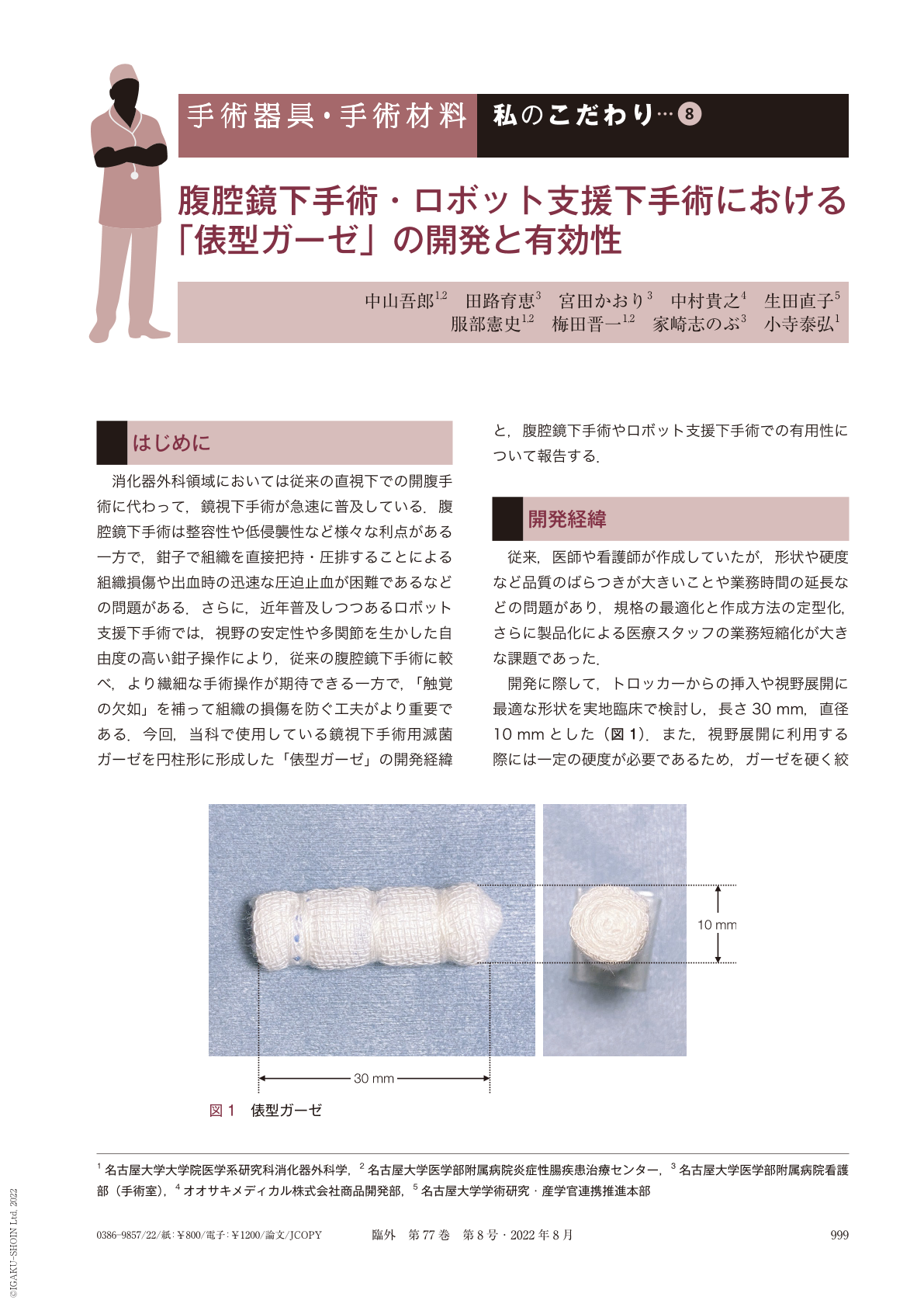
消化器外科領域においては従来の直視下での開腹手術に代わって,鏡視下手術が急速に普及している.腹腔鏡下手術は整容性や低侵襲性など様々な利点がある一方で,鉗子で組織を直接把持・圧排することによる組織損傷や出血時の迅速な圧迫止血が困難であるなどの問題がある.さらに,近年普及しつつあるロボット支援下手術では,視野の安定性や多関節を生かした自由度の高い鉗子操作により,従来の腹腔鏡下手術に較べ,より繊細な手術操作が期待できる一方で,「触覚の欠如」を補って組織の損傷を防ぐ工夫がより重要である.今回,当科で使用している鏡視下手術用滅菌ガーゼを円柱形に形成した「俵型ガーゼ」の開発経緯と,腹腔鏡下手術やロボット支援下手術での有用性について報告する.
*本論文中、[▶動画]マークのある図につきましては、関連する動画を見ることができます(公開期間:2025年8月末まで)。
Copyright © 2022, Igaku-Shoin Ltd. All rights reserved.

