Japanese
English
特集 脳のシンポジウム
主題:生体の情報処理
手動制御における人間—機械系の応答特性について
On the Characteristics of Human Response in a Manual Tracking System
南雲 仁一
1
Jin-ichi Nagumo
1
1東京大学工学部計数工学科
1Department of Mathematical Engineering and Instrumentation Physics, Faculty of Engineering, University of Tokyo
pp.547-550
発行日 1967年10月25日
Published Date 1967/10/25
DOI https://doi.org/10.11477/mf.1431906420
- 有料閲覧
- Abstract 文献概要
- 1ページ目 Look Inside
I.はしがき
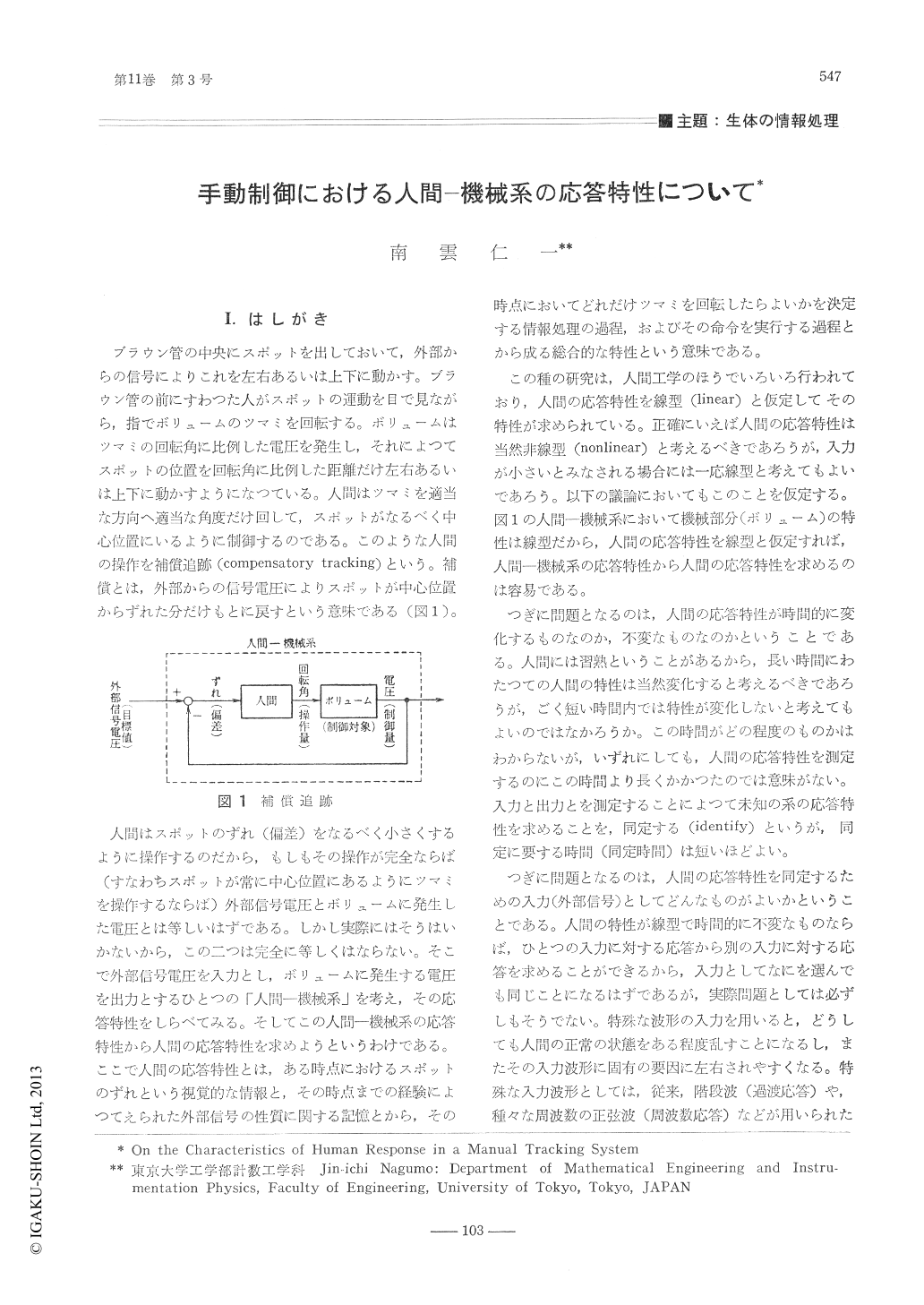
ブラウン管の中央にスポットを出しておいて,外部からの信号によりこれを左右あるいは上下に動かす。ブラウン管の前にすわつた人がスポットの運動を目で見ながら,指でボリュームのツマミを回転する。ボリュームはツマミの回転角に比例した電圧を発生し,それによつてスポットの位置を回転角に比例した距離だけ左右あるいは上下に動かすようになつている。人間はツマミを適当な方向へ適当な角度だけ回して,スポットがなるべく中心位置にいるように制御するのである。このような人間の操作を補償追跡(compensatory tracking)という。補償とは,外部からの信号電圧によりスポットが中心位置からずれた分だけもとに戻すという意味である(図1)。
人間はスポットのずれ(偏差)をなるべく小さくするように操作するのだから,もしもその操作が完全ならば(すなわちスポットが常に中心位置にあるようにツマミを操作するならば)外部信号電圧とボリュームに発生した電圧とは等しいはずである。しかし実際にはそうはいかないから,この二つは完全に等しくはならない。そこで外部信号電圧を入力とし,ボリュームに発生する電圧を出力とするひとつの「人間—機械系」を考え,その応答特性をしらべてみる。そしてこの人間—機械系の応答特性から人間の応答特性を求めようというわけである。
Copyright © 1967, Igaku-Shoin Ltd. All rights reserved.

