Japanese
English
特集 起立と歩行
起立から歩行へ―中枢神経系の姿勢保持機構
Integration of neuronal mechanisms related to locomotor control and postural control.
森 茂美
1
Shigemi MORI
1
1旭川医科大学生理学第二講座
1Department of Physiology, Asahikawa Medical College
pp.173-188
発行日 1991年4月10日
Published Date 1991/4/10
DOI https://doi.org/10.11477/mf.1431900119
- 有料閲覧
- Abstract 文献概要
- 1ページ目 Look Inside
はじめに
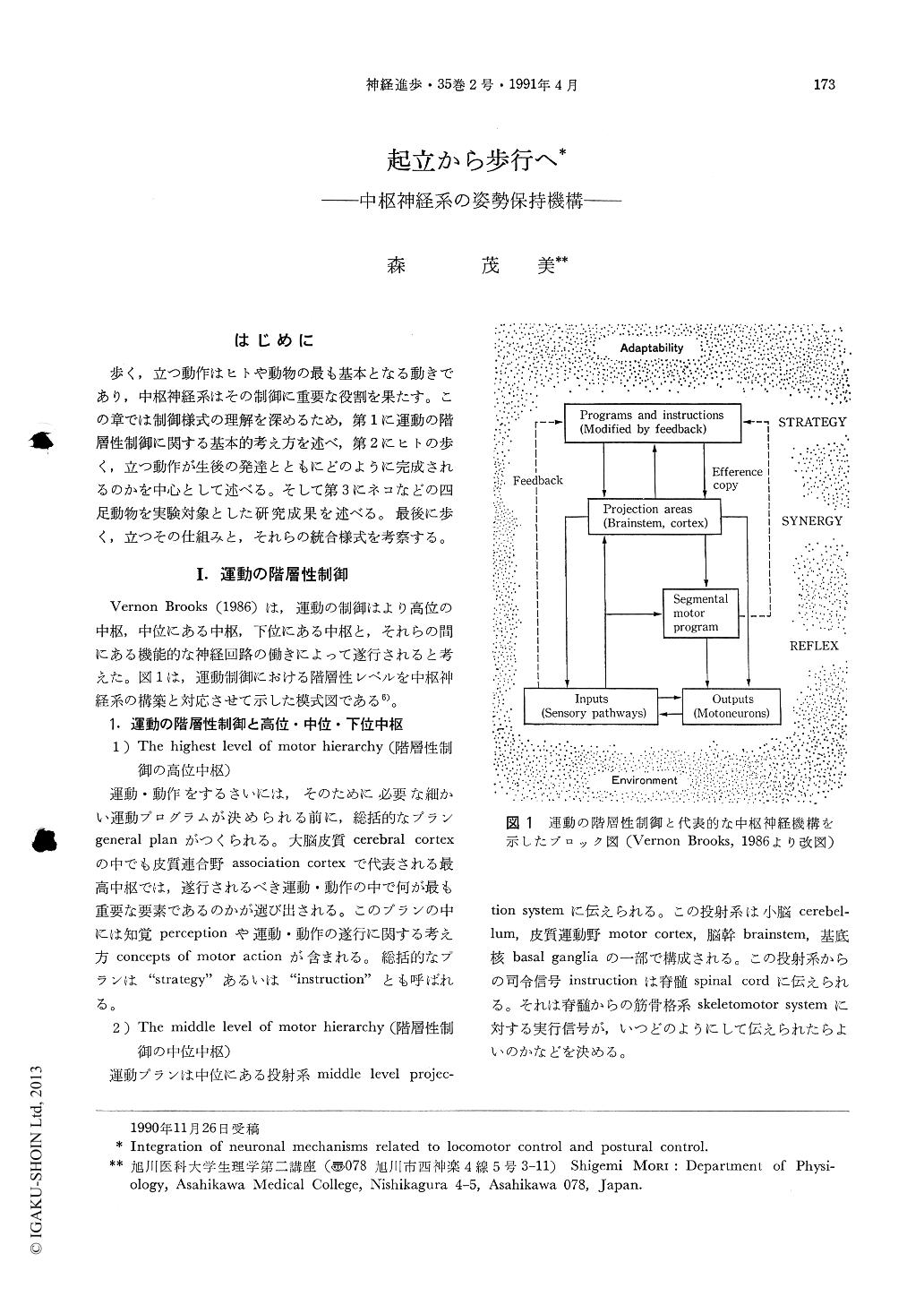
歩く,立つ動作はヒトや動物の最も基本となる動きであり,中枢神経系はその制御に重要な役割を果たす。この章では制御様式の理解を深めるため,第1に運動の階層性制御に関する基本的考え方を述べ,第2にヒトの歩く,立つ動作が生後の発達とともにどのように完成されるのかを中心として述べる。そして第3にネコなどの四足動物を実験対象とした研究成果を述べる。最後に歩く,立つその仕組みと,それらの統合様式を考察する。
To initiate and terminate locomotor movements both in the biped and in the quadruped, a smooth transition from and to standing is necessary, standing being another active motor behavior. During locomotion, an animal controls without interruption the speed and direction of the locomotion, is able to circumvent all obstacles and anticipates necessary conditions, and deals with unexpected perturba-tions. Locomotion and upright standing posture are the two basic motor behaviors common to the bipeds and quardupeds.
Copyright © 1991, Igaku-Shoin Ltd. All rights reserved.

