整形外科の手術手技-私はこうしている
ハイテク手術機器 手術用ロボットシステムを用いたOberlin法による肘関節屈曲再建術
内藤 聖人
1
,
金子 和夫
,
Liverneaux Philippe
1順天堂大学 整形外科
キーワード:
外科用機器
,
肘関節
,
コンピュータ支援手術
,
ロボット
Keyword:
Elbow Joint
,
Surgical Equipment
,
Surgery, Computer-Assisted
pp.7-10
発行日 2014年10月10日
Published Date 2014/10/10
DOI https://doi.org/10.15106/J04037.2015040673
- 有料閲覧
- 文献概要
- 1ページ目
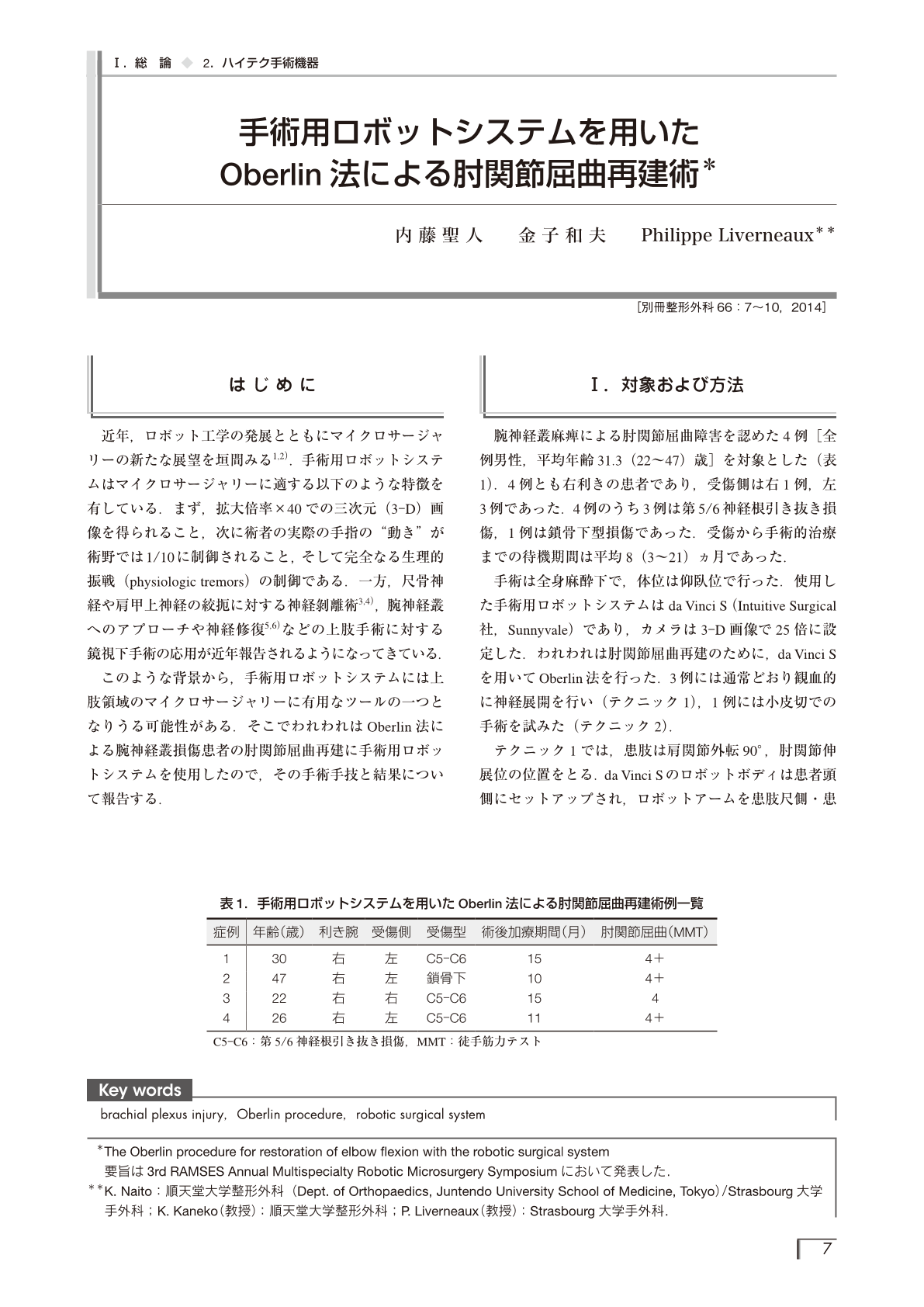
手術用ロボットシステムを用いたOberlin法による肘関節屈曲再建術について検討した。腕紳経叢麻痺による肘関節屈曲障害を認めた4例を対象とした。手術用ロボットシステムはda Vinci Sを用いた。3例には通常どおり観血的に神経展開を行い(テクニック1)、1例には小皮切での手術を試みた(テクニック2)。平均観察期間は12ヵ月(10~15ヵ月)で、すべての症例で肘関節届曲筋力は従手筋カテスト(MMT)4以上の回復を認めた。尺骨神経領域の感覚障害は認めなかった。テクニック1では手技上の支障はなかった。テクニック2では、CO2ガスによる皮下ワーキングスペースの維持やカメラが接近しすぎることなどが原因となり、開始後30分でテクニック1へ変更した。
©Nankodo Co., Ltd., 2014